Below is a collection of some miscellaneous 1D differential equations. See here for more on 2D systems.
Trigonometry…?
The form is kind of reminiscent of Pythagorean theorem for a right triangle with legs and . How can we use this to our advantage?
Consider the following setup: a lighthouse is situated at the origin and currently aims directly at the line . However, it rotates at a rate of , and we’d like to track the point of intersection between the lighthouse’s beam and the line .
Let the current point of intersection be . Then, we’d like to know how much increases after seconds.
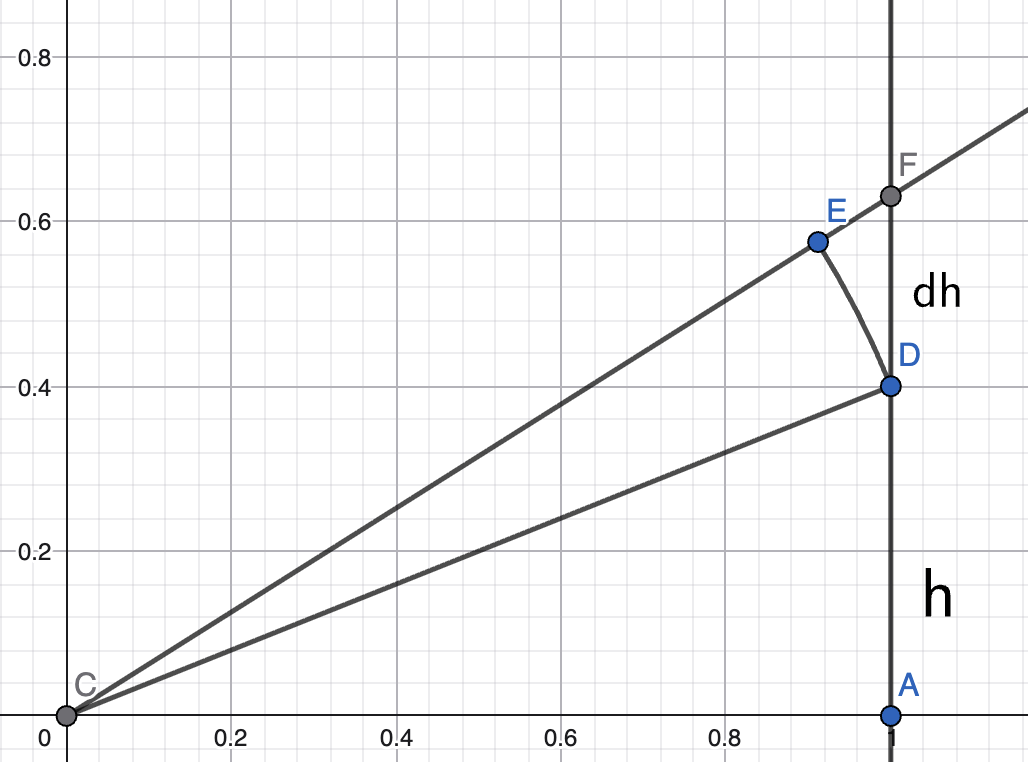
Our goal is to find in terms of . Let ; then, by Pythagorean theorem, we know that . We also know that is just a very small arc, so its length is .
It remains to find in terms of , which can be done by noting that . Therefore, , meaning , as desired.
Of course, is also simply , therefore the solution to our original differential equation is simply
(remember to replace with since is a time-invariant system.)
Note that in the general case of for , we must be careful to note that the solution is not just but rather
We can also make a pretty nice geometric argument here in which is interpreted as the y-projection of an arc of length . Details left to the reader, but solution turns out to be
Without the on RHS, would just be . Then, note that adding some constant to will leave the LHS unchanged while increasing the RHS by . Therefore, we should just be to get
Again, let’s try solving it without the on the RHS first. For which functions is differentiation equivalent to multiplication by ? This is just the class of functions .
This time, note that we cannot just add a constant to , otherwise the RHS will have a nasty term. However, what if we add a term? Then the LHS will increase by while the RHS increases by . Therefore we want . So, our final solution is